Cambiar ejes en MATLAB para robots con notación DH: Guía completa
MATLAB es una herramienta ampliamente utilizada en la industria y la academia para el análisis y la simulación de sistemas dinámicos. En el campo de la robótica, MATLAB ofrece diversas funciones y herramientas para el diseño y control de robots. Uno de los aspectos fundamentales al trabajar con robots es el modelado y la cinemática, y una forma común de representar la estructura de un robot es a través de la notación de Denavit-Hartenberg (DH).
Exploraremos cómo cambiar los ejes en MATLAB para robots que utilizan la notación DH. Veremos cómo especificar los parámetros DH, cómo crear la matriz de transformación homogénea y cómo realizar operaciones de cambio de ejes utilizando las funciones y herramientas proporcionadas por MATLAB. Además, también discutiremos las implicaciones y aplicaciones prácticas de cambiar los ejes en el contexto de la robótica.
¿Qué verás en este artículo?
- Cuál es la importancia de la notación DH en la cinemática de los robots
- Cómo se representan los ejes en la notación DH
- Qué problemas puede haber al utilizar la notación DH en la representación de los ejes de un robot
- Cuáles son las ventajas de cambiar los ejes en MATLAB para robots con notación DH
- Cómo se realiza el cambio de ejes en MATLAB para robots con notación DH
- Cuál es el impacto en la cinemática de un robot al cambiar los ejes en MATLAB
- Cómo afecta el cambio de ejes a la programación de movimientos en un robot
- Existen herramientas o funciones especiales en MATLAB para facilitar el cambio de ejes en robots con notación DH
- Cuáles son los pasos a seguir para cambiar los ejes en MATLAB para robots con notación DH
- Existen ejemplos o casos de estudio que demuestren la utilidad del cambio de ejes en MATLAB para robots con notación DH
-
Preguntas frecuentes (FAQ)
- 1. ¿Qué es la notación DH en robótica?
- 2. ¿Por qué es importante cambiar ejes en MATLAB para robots con notación DH?
- 3. ¿Cómo puedo cambiar los ejes en MATLAB para robots con notación DH?
- 4. ¿Qué son los parámetros DH en robótica?
- 5. ¿Cuál es la ventaja de cambiar los ejes en MATLAB para robots con notación DH?
Cuál es la importancia de la notación DH en la cinemática de los robots
La notación DH (Denavit-Hartenberg) es una herramienta fundamental en la cinemática de los robots. Esta notación permite describir de manera sistemática los parámetros geométricos y cinemáticos de un robot, como las longitudes de los eslabones y los ángulos de orientación. Cambiar los ejes en MATLAB para robots con notación DH es esencial para poder modelar y controlar de manera precisa el movimiento de los robots en diferentes configuraciones.
Al cambiar los ejes en MATLAB, se establecen los sistemas de referencia locales de cada eslabón del robot, lo que facilita el cálculo de las transformaciones de los ejes y la obtención de las matrices de transformación homogénea. Estas matrices son indispensables para determinar la posición y orientación del efector final del robot en función de las variables articulares.
La notación DH define una secuencia de transformaciones entre los ejes consecutivos, que se pueden representar mediante una matriz de transformación homogénea. Estas matrices permiten relacionar los sistemas de referencia locales de cada eslabón con el sistema de referencia global del robot. Así, se puede analizar y controlar el movimiento del robot en diferentes configuraciones y tareas.
En MATLAB, cambiar los ejes para robots con notación DH implica definir los parámetros DH de cada eslabón, que incluyen las longitudes de los eslabones, los ángulos de orientación y los desplazamientos entre los sistemas de referencia de los ejes. Estos parámetros se utilizan para construir las matrices de transformación homogénea y realizar las operaciones de cinemática directa e inversa.
La capacidad de cambiar los ejes en MATLAB para robots con notación DH es especialmente útil en la simulación y control de robots manipuladores. Esta herramienta permite modelar el comportamiento cinemático de los robots en diferentes configuraciones, analizar su cinemática inversa y directa, y diseñar algoritmos de control para controlar su movimiento con precisión.
Cómo se representan los ejes en la notación DH
La notación DH (Denavit-Hartenberg) es comúnmente utilizada para describir la cinemática de robots. En esta notación, los ejes de un robot se representan mediante una serie de parámetros, cada uno de los cuales tiene un significado específico.
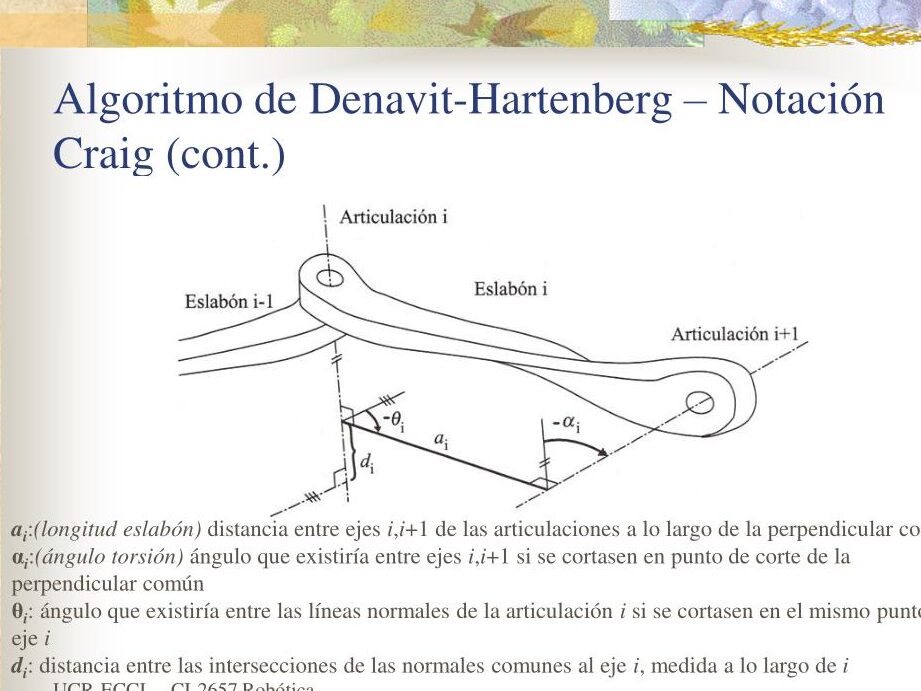
Existen cuatro parámetros DH principales: la longitud del enlace (d), el ángulo de inclinación (θ), la distancia entre los ejes (a) y el ángulo de deslizamiento (α). Cada uno de estos parámetros juega un papel fundamental en la representación de los ejes del robot.
El parámetro d representa la distancia perpendicular entre los ejes z_n-1 y z_n, mientras que el parámetro a representa la distancia entre los ejes x_n-1 y x_n medido a lo largo del eje z_n-1. El ángulo θ representa la rotación alrededor del eje z_n-1, mientras que el ángulo α representa la rotación alrededor del eje x_n.
De esta manera, la notación DH permite una representación clara y concisa de los ejes de un robot, lo que facilita el análisis y la comprensión de su cinemática.
Qué problemas puede haber al utilizar la notación DH en la representación de los ejes de un robot
La notación DH (Denavit-Hartenberg) es ampliamente utilizada en la representación de los ejes de un robot en MATLAB. Sin embargo, esta notación puede presentar algunos problemas que es importante tener en cuenta.
Uno de los problemas más comunes al utilizar la notación DH es la posibilidad de obtener resultados inconsistentes si no se definen correctamente los ejes de referencia. Esto puede llevar a errores en el cálculo de las transformaciones entre los diferentes sistemas de coordenadas.
Otro problema que puede surgir al utilizar la notación DH es la dificultad para representar de forma precisa ciertos tipos de configuraciones de robots. Por ejemplo, en robots con articulaciones esféricas o en paralelo, la notación DH puede resultar limitada y dificultar la modelización adecuada del sistema.
Además, la notación DH puede presentar problemas de singularidades en determinadas configuraciones de robots. Estas singularidades pueden afectar negativamente el rendimiento y la estabilidad del robot.
Si bien la notación DH es ampliamente utilizada en la representación de ejes de robots en MATLAB, es importante tener en cuenta los posibles problemas que pueden surgir al utilizar esta notación y tomar las precauciones necesarias para obtener resultados precisos y consistentes.
Cuáles son las ventajas de cambiar los ejes en MATLAB para robots con notación DH
Cambiar los ejes en MATLAB para robots con notación DH puede ofrecer varias ventajas.
En primer lugar, permite una representación más clara y concisa de la cinemática del robot. Al redefinir los ejes de manera adecuada, se puede simplificar la descripción del robot y facilitar su comprensión.
Además, cambiar los ejes puede ayudar a mejorar la visualización y la navegación en entornos virtuales. Al tener una representación más realista del robot, es posible simular y planificar mejor los movimientos, lo que resulta especialmente útil en aplicaciones de robótica.
Por otro lado, cambiar los ejes también permite ajustar el cálculo de las transformaciones de Denavit-Hartenberg (DH). Al manipular los ejes, se pueden simplificar las ecuaciones y reducir los errores de cálculo, lo que conduce a una mayor precisión en las operaciones del robot.
Cambiar los ejes en MATLAB para robots con notación DH puede mejorar la comprensión, la visualización y la precisión en las operaciones del robot. Es una técnica que vale la pena considerar para optimizar el rendimiento de los sistemas de robótica.
Cómo se realiza el cambio de ejes en MATLAB para robots con notación DH
El cambio de ejes en MATLAB para robots con notación DH es una operación fundamental para la cinemática de robots manipuladores. Este proceso permite definir las relaciones geométricas entre los diferentes eslabones de un robot, lo que facilita la planificación de movimientos y la ejecución de tareas específicas.
Para realizar el cambio de ejes en MATLAB, se utiliza la función dhparam que permite definir los parámetros de Denavit-Hartenberg para cada eslabón del robot. Estos parámetros incluyen la longitud del eslabón, el ángulo de rotación alrededor del eje Z y las distancias a lo largo de los ejes X e Y.
Una vez definidos los parámetros de Denavit-Hartenberg, se utiliza la función transl para calcular la matriz de transformación homogénea entre dos eslabones consecutivos. Esta matriz representa la rotación y la traslación entre los sistemas de referencia de los eslabones y permite calcular la posición y orientación del efector final.
En el caso de un robot con notación DH, el cambio de ejes se realiza de forma secuencial, aplicando las transformaciones entre cada par de eslabones consecutivos. Para ello, se utiliza un bucle que recorre todos los eslabones del robot y calcula la matriz de transformación homogénea correspondiente.
Una vez realizadas todas las transformaciones, se obtiene la matriz de transformación homogénea total que representa la posición y orientación del efector final con respecto al sistema de referencia base. Esta matriz se puede utilizar para realizar la planificación de movimientos, la simulación y el control del robot.
El cambio de ejes en MATLAB para robots con notación DH es un proceso fundamental para la cinemática de robots manipuladores. Permite definir las relaciones geométricas entre los eslabones del robot y calcular la posición y orientación del efector final. Esto facilita la planificación de movimientos y la realización de tareas específicas en el robot.
Cuál es el impacto en la cinemática de un robot al cambiar los ejes en MATLAB
Cuando se trabaja con robots en MATLAB, es esencial comprender cómo los cambios en los ejes pueden afectar la cinemática del robot. La cinemática del robot se refiere al estudio del movimiento y la posición de los diferentes elementos del robot.
En la notación de Denavit-Hartenberg (DH), los ejes son fundamentales para describir la geometría del robot y determinar los parámetros del enlace. Por lo tanto, cambiar los ejes puede tener un impacto significativo en la cinemática del robot.
Por ejemplo, un cambio en el sistema de coordenadas puede afectar directamente los ángulos de los enlaces, las matrices de transformación homogénea y los desplazamientos de cada enlace. Esto, a su vez, puede alterar los cálculos de cinemática directa e inversa del robot en MATLAB.
Además, el cambio de ejes puede tener implicaciones en la planificación de trayectorias y en la dinámica del robot. Dado que los ejes influyen en la representación de la estructura del robot, cualquier alteración en ellos puede cambiar la forma en que el robot se mueve y se comporta en un entorno determinado.
Cambiar los ejes en MATLAB para robots con notación DH puede tener un impacto importante en la cinemática y el comportamiento del robot. Es crucial comprender las implicaciones de estos cambios para poder realizar simulaciones y análisis precisos en MATLAB.
Cómo afecta el cambio de ejes a la programación de movimientos en un robot
El cambio de ejes en un robot con notación DH puede tener un impacto significativo en la programación de movimientos. La notación DH (Denavit-Hartenberg) es un sistema utilizado para describir la cinemática de un robot. Define una serie de parámetros, incluyendo los ángulos de rotación y las longitudes de los eslabones, que determinan la posición y orientación del robot en el espacio.
Cuando se realiza un cambio de ejes en un robot, se altera la forma en que se describen estos parámetros. Esto puede implicar modificar la notación DH original y ajustar las ecuaciones cinemáticas correspondientes. El cambio de ejes puede ser necesario por diversas razones, como mejorar la ergonomía de un robot o adaptarlo a un entorno de trabajo específico.
La programación de movimientos en un robot con cambio de ejes requiere tener en cuenta estas modificaciones. Esto implica ajustar los cálculos y las ecuaciones utilizadas para determinar las nuevas posiciones y orientaciones del robot. Además, es importante considerar cómo estos cambios afectan la planificación de movimientos y la cinemática inversa del robot.
El cambio de ejes en un robot con notación DH puede tener un impacto significativo en la programación de movimientos. Requiere ajustar las ecuaciones cinemáticas y considerar cómo estos cambios afectan la planificación de movimientos y la cinemática inversa del robot.
Existen herramientas o funciones especiales en MATLAB para facilitar el cambio de ejes en robots con notación DH
Una de las tareas más comunes en la programación de robots es el cambio de ejes para adaptarlo a las necesidades específicas de una tarea. En MATLAB, existen varias herramientas y funciones que simplifican este proceso para robots con notación DH (Denavit-Hartenberg).
Una de las funciones más utilizadas es "rotx", que permite rotar un eje alrededor del eje X en un ángulo determinado. Esta función es especialmente útil cuando se necesita cambiar la orientación de un eje en particular sin modificar las demás coordenadas.
Otra función útil es "transl", que permite desplazar un eje en una dirección específica. Esto es útil cuando se necesita mover un eje a una nueva posición sin cambiar su orientación.
Además de estas funciones básicas, MATLAB también ofrece herramientas como la "Transformación Homogénea", que permite realizar transformaciones más complejas que implican rotaciones y traslaciones simultáneas.
Para utilizar estas herramientas y funciones, es importante tener en cuenta la notación DH del robot, que describe la relación entre los diferentes ejes y sus parámetros geométricos.
MATLAB ofrece herramientas y funciones especiales para facilitar el cambio de ejes en robots con notación DH. Estas herramientas y funciones simplifican el proceso de modificar la orientación y posición de los ejes, lo que permite adaptar el robot a diferentes tareas y requerimientos específicos.
Cuáles son los pasos a seguir para cambiar los ejes en MATLAB para robots con notación DH
Cuando trabajamos con robots en MATLAB que utilizan la notación DH (Denavit-Hartenberg), a veces necesitamos cambiar la configuración de los ejes. Esto puede ser necesario para ajustar la geometría del robot o para adaptarlo a diferentes requisitos de movimiento. Afortunadamente, MATLAB nos proporciona una forma sencilla de realizar este cambio.
Paso 1: Definir la estructura del robot
Antes de cambiar los ejes, es importante tener una comprensión clara de la estructura del robot. Esto implica definir los parámetros DH, como las longitudes de los eslabones y los ángulos de rotación. Una vez que tengamos esto, podemos proceder al paso siguiente.
Paso 2: Crear una matriz de transformación homogénea
La matriz de transformación homogénea nos permite representar la posición y orientación de cada eslabón del robot en relación con su eslabón vecino. Debemos crear esta matriz para cada eslabón del robot, teniendo en cuenta los parámetros DH definidos previamente.
Paso 3: Aplicar la transformación a los ejes
Una vez que tengamos todas las matrices de transformación homogéneas, podemos aplicarlas a cada uno de los ejes del robot. Esto implica multiplicar las matrices y obtener una nueva configuración de los ejes.
Paso 4: Verificar los resultados
Es importante verificar los resultados para asegurarnos de que los ejes se hayan cambiado correctamente. Podemos utilizar visualizaciones en 3D para comprobar cómo se ve el robot con la nueva configuración de ejes.
Paso 5: Utilizar los nuevos ejes
Una vez que estemos satisfechos con los resultados, podemos utilizar los nuevos ejes para controlar el robot en MATLAB. Podremos realizar movimientos y cálculos de cinemática y dinámica con la nueva configuración de ejes.
Cambiar los ejes en MATLAB para robots con notación DH puede ser necesario en diversas situaciones. Al seguir los pasos mencionados anteriormente, podemos realizar fácilmente este cambio y adaptar el robot a nuestras necesidades específicas.
Existen ejemplos o casos de estudio que demuestren la utilidad del cambio de ejes en MATLAB para robots con notación DH
El cambio de ejes en MATLAB para robots con notación DH es una herramienta muy útil en la simulación y control de robots. Para demostrar su utilidad, existen numerosos ejemplos y casos de estudio que han sido llevados a cabo por investigadores y expertos en robótica.
Uno de los ejemplos más comunes es el brazo robótico de 6 grados de libertad. En este caso, el cambio de ejes permite simplificar los cálculos y hacer que la descripción del sistema sea más clara y concisa.
Otro ejemplo de aplicación del cambio de ejes es el control de un robot para tareas de ensamblaje. En este caso, el cambio de ejes permite definir de manera precisa los movimientos del robot, facilitando la programación y optimizando el rendimiento.
Además, también existen casos de estudio en los que se utiliza el cambio de ejes en MATLAB para la simulación de robots humanoides. El cambio de ejes permite modelar con precisión los movimientos y comportamientos de estos robots, lo que es fundamental para el desarrollo de aplicaciones en áreas como la robótica asistencial o la robótica de entretenimiento.
Existen numerosos ejemplos y casos de estudio que demuestran la utilidad del cambio de ejes en MATLAB para robots con notación DH. Esta herramienta simplifica los cálculos, facilita la programación y permite modelar con precisión los movimientos de los robots en diferentes aplicaciones.
Preguntas frecuentes (FAQ)
1. ¿Qué es la notación DH en robótica?
La notación DH (Denavit-Hartenberg) es un método para describir la geometría y cinemática de los robots manipuladores. Consiste en asignar sistemas de referencia a cada eslabón del robot y definir una serie de parámetros que describen la posición relativa y orientación de los sistemas de referencia.
2. ¿Por qué es importante cambiar ejes en MATLAB para robots con notación DH?
Al cambiar los ejes en MATLAB para robots con notación DH, podemos simplificar los cálculos necesarios para obtener la cinemática directa e inversa del robot. Esto es especialmente útil cuando se trabaja con robots de múltiples grados de libertad.
3. ¿Cómo puedo cambiar los ejes en MATLAB para robots con notación DH?
Para cambiar los ejes en MATLAB para robots con notación DH, debes utilizar la función dhparam2matrix, la cual toma como entrada un vector de parámetros DH y devuelve una matriz de transformación que representa la posición y orientación del eslabón correspondiente.
4. ¿Qué son los parámetros DH en robótica?
Los parámetros DH son una serie de valores que describen la posición relativa y orientación de los sistemas de referencia en la notación DH. Estos parámetros incluyen la longitud del eslabón, el ángulo de rotación alrededor del eje z, la distancia entre los ejes, y el ángulo de rotación alrededor del eje x.
5. ¿Cuál es la ventaja de cambiar los ejes en MATLAB para robots con notación DH?
Al cambiar los ejes en MATLAB para robots con notación DH, podemos obtener de forma más directa y sencilla la matriz de transformación homogénea que relaciona el sistema de referencia de un eslabón con el siguiente, lo cual es fundamental para realizar cálculos de cinemática directa e inversa en robots manipuladores.
Calcula la derivada por definición en MATLAB: paso a paso

Añade columna al inicio de un vector en MATLAB: guía fácil y rápida
Conviértete en un experto: Cómo crear un array de 0 a 1 en MATLAB
Encuentra fácilmente el valor mínimo en un array cell en MATLAB
Abre tus ficheros de forma rápida y sencilla con este script de Matlab
Elimina archivos de una carpeta con Matlab de forma sencilla
Elevar 10 a un número en MATLAB: La guía definitiva sin complicaciones
Aprende fácilmente a calcular las soluciones de una función con MATLAB
Calcula la media de un vector en Matlab fácilmente paso a paso
Deja una respuesta
Artículos que podrían interesarte