Aprende a optimizar tu controlador PID en MATLAB de forma automática
Los controladores PID (Proporcional, Integral y Derivativo) son ampliamente utilizados en la industria y en sistemas de control para mejorar la precisión y estabilidad de los procesos. Sin embargo, ajustar los parámetros del controlador PID de manera óptima puede ser un desafío para los ingenieros, ya que implica encontrar la combinación adecuada de valores que optimicen la respuesta del sistema en función de los objetivos deseados.
Te mostraré cómo puedes utilizar MATLAB para optimizar automáticamente los parámetros de tu controlador PID. Explicaré el concepto básico del controlador PID, los desafíos asociados con su ajuste manual y cómo la optimización automática puede ayudarte a encontrar rápidamente la configuración óptima para tu sistema. También proporcionaré un ejemplo práctico de cómo implementar la optimización automática en MATLAB y cómo interpretar los resultados obtenidos.
¿Qué verás en este artículo?
- Cuál es la importancia de optimizar el controlador PID en MATLAB
- Cómo funciona el método automático de optimización en MATLAB
- Cuáles son los parámetros que se pueden ajustar en un controlador PID en MATLAB
- Cuáles son los criterios de rendimiento más comunes para optimizar un controlador PID
- Cómo utilizar el algoritmo de optimización en MATLAB para ajustar los parámetros del controlador PID
- Cuáles son las ventajas y desventajas de utilizar la optimización automática en lugar de ajustar manualmente los parámetros del controlador PID
- Existen herramientas o funciones adicionales en MATLAB que faciliten la optimización del controlador PID
- Es posible combinar la optimización automática con técnicas de control avanzadas en MATLAB
- Cómo evaluar el rendimiento del controlador PID optimizado en MATLAB
- Cuáles son los pasos recomendados para implementar el controlador PID optimizado en un sistema real
- Preguntas frecuentes (FAQ)
Cuál es la importancia de optimizar el controlador PID en MATLAB
La optimización del controlador PID en MATLAB es crucial para mejorar la precisión y estabilidad de los sistemas de control. Un controlador PID (Proporcional-Integral-Derivativo) es ampliamente utilizado en la industria para ajustar y controlar parámetros importantes en sistemas dinámicos. Sin embargo, el rendimiento del controlador depende de la elección adecuada de los valores de sus parámetros. La optimización automática del controlador PID en MATLAB permite encontrar los valores óptimos de estos parámetros de manera eficiente, maximizando el rendimiento del sistema y minimizando los errores de control. A continuación, exploraremos las diferentes técnicas y herramientas disponibles en MATLAB para optimizar el controlador PID de forma automática.
Cómo funciona el método automático de optimización en MATLAB
El método automático de optimización en MATLAB ofrece varias ventajas importantes:
- Eficiencia: Este método utiliza algoritmos de optimización que permiten encontrar la configuración óptima de los parámetros del controlador de manera rápida y eficiente.
- Flexibilidad: El método automático de optimización en MATLAB puede adaptarse a diferentes criterios de rendimiento, lo que permite ajustar los parámetros del controlador según las necesidades específicas del sistema.
- Mejora del rendimiento: Al encontrar los parámetros óptimos del controlador PID, el método automático de optimización en MATLAB puede mejorar el rendimiento del sistema, reduciendo el tiempo de respuesta, aumentando la estabilidad y mejorando la precisión.
- Ajustes rápidos: Gracias a la automatización del proceso de optimización, el método en MATLAB permite realizar ajustes rápidos y eficientes a medida que cambian las condiciones del sistema o se requiere un rendimiento diferente.
- Facilidad de implementación: La configuración óptima de los parámetros del controlador obtenida mediante el método automático de optimización en MATLAB puede implementarse de manera directa en un sistema real sin necesidad de realizar ajustes manuales.
En resumen, el método automático de optimización en MATLAB es una herramienta poderosa para encontrar los parámetros óptimos de un controlador PID. Su eficiencia, flexibilidad y capacidad para mejorar el rendimiento del sistema lo convierten en una opción atractiva para los ingenieros y científicos que buscan una solución rápida y eficiente para el ajuste de controladores.
Cuáles son los parámetros que se pueden ajustar en un controlador PID en MATLAB
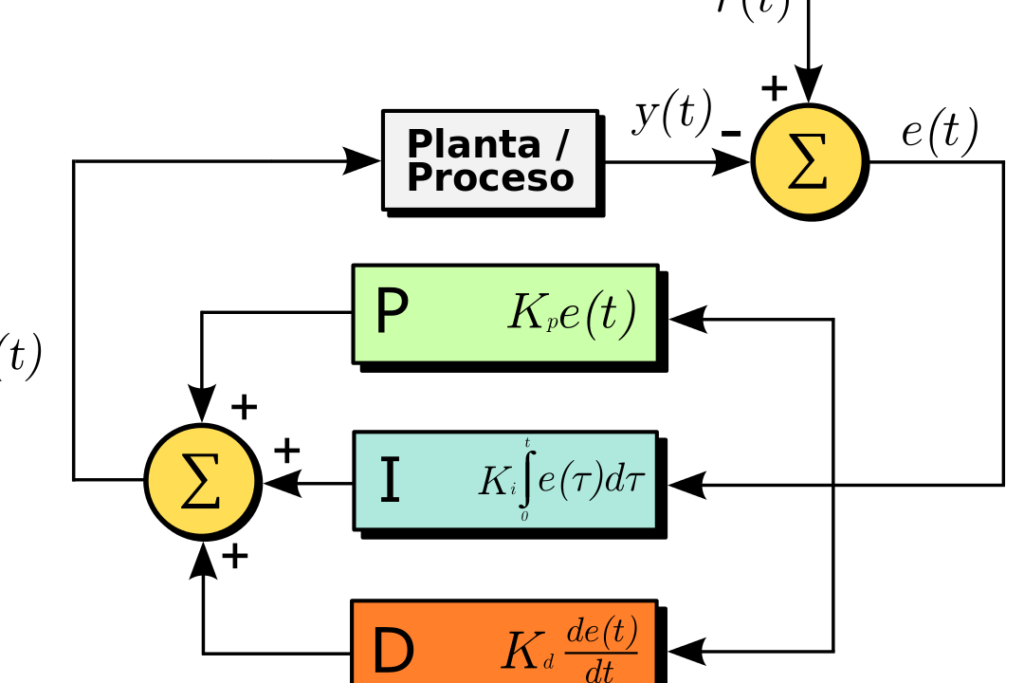
Los controladores PID (Proporcional, Integral, Derivativo) son ampliamente utilizados en el campo de la ingeniería para controlar sistemas dinámicos. En MATLAB, existen tres parámetros principales que se pueden ajustar en un controlador PID: el término proporcional (Kp), el término integral (Ki) y el término derivativo (Kd).
El término proporcional (Kp) determina la respuesta del controlador en función del error presente. Un valor alto de Kp producirá una respuesta más rápida pero puede llevar a una mayor oscilación del sistema. Por otro lado, un valor bajo de Kp puede resultar en una respuesta lenta del sistema.
El término integral (Ki) tiene en cuenta el error acumulado a lo largo del tiempo. Un valor alto de Ki puede ayudar a reducir el error constante y compensar las perturbaciones, pero también puede provocar oscilaciones y aumentar la respuesta transitoria. Un valor bajo de Ki puede hacer que el sistema sea menos sensible a las perturbaciones pero puede resultar en un error constante.
El término derivativo (Kd) tiene en cuenta la tasa de cambio del error. Un valor alto de Kd puede ayudar a reducir la oscilación y mejorar la respuesta transitoria, pero también puede amplificar el ruido y hacer que el sistema sea más sensible a las perturbaciones. Un valor bajo de Kd puede hacer que el sistema sea menos receptivo a las perturbaciones y puede resultar en una respuesta más suave pero lenta.
Cuáles son los criterios de rendimiento más comunes para optimizar un controlador PID
La optimización de un controlador PID es fundamental para garantizar un rendimiento óptimo en sistemas de control. Para ello, es necesario definir criterios de rendimiento que permitan evaluar la efectividad del controlador. Algunos de los criterios más comunes incluyen el error en estado estacionario, el tiempo de respuesta, el sobrepico y la estabilidad del sistema.
El error en estado estacionario se refiere a la diferencia entre el valor deseado y el valor real en la condición de equilibrio del sistema. Un controlador con un bajo error en estado estacionario es considerado más preciso.
El tiempo de respuesta es el tiempo que tarda el sistema en alcanzar un estado estable después de una perturbación. Cuanto menor sea este tiempo, más rápido será el sistema en responder a cambios.
El sobrepico es la máxima sobreelongación que se produce en la respuesta del sistema antes de alcanzar el estado estable. Un controlador con un bajo sobrepico se considera más estable.
La estabilidad del sistema es crucial para asegurar que no haya oscilaciones indeseadas o inestabilidades. Un controlador estable garantiza un comportamiento suave y controlado del sistema.
Al optimizar un controlador PID, es importante considerar criterios de rendimiento como el error en estado estacionario, el tiempo de respuesta, el sobrepico y la estabilidad del sistema. Estos criterios permiten evaluar la efectividad del controlador y ajustar sus parámetros para lograr un rendimiento óptimo.
Cómo utilizar el algoritmo de optimización en MATLAB para ajustar los parámetros del controlador PID
El controlador PID es ampliamente utilizado en el campo de la ingeniería y la automatización para controlar sistemas dinámicos. Sin embargo, ajustar los parámetros del controlador puede ser un desafío, especialmente cuando el sistema es complejo o no se dispone de un modelo matemático preciso.
Afortunadamente, MATLAB ofrece un algoritmo de optimización que permite ajustar los parámetros del controlador PID de forma automática. Este algoritmo utiliza técnicas de búsqueda para encontrar los valores óptimos de los parámetros, minimizando así el error entre la salida deseada y la salida real del sistema.
Primer paso: Definir la función de costo
Antes de comenzar con la optimización, es necesario definir una función de costo que evalúe el rendimiento del controlador PID. Esta función debe tener en cuenta el error entre la salida deseada y la salida real, así como cualquier otra restricción o criterio de rendimiento específico del sistema.
En MATLAB, esta función de costo puede ser implementada utilizando la sintaxis de las funciones anónimas. Por ejemplo, si el objetivo es minimizar el error cuadrático medio, la función de costo podría ser definida de la siguiente manera:
costo = @(Kp, Ki, Kd) sum((y_deseada - salida_real).^2);
Donde Kp, Ki y Kd son los parámetros del controlador PID, y_deseada es la salida deseada y salida_real es la salida real del sistema.
Segundo paso: Configurar el algoritmo de optimización
Una vez que la función de costo está definida, es necesario configurar el algoritmo de optimización en MATLAB. El algoritmo de optimización utilizado comúnmente es el 'fminsearch', el cual realiza una búsqueda local de los parámetros óptimos.
La configuración del algoritmo de optimización incluye la definición del rango de búsqueda para cada parámetro del controlador, así como la definición de cualquier restricción adicional, como valores mínimos o máximos. Por ejemplo:
parametros_optimos = fminsearch(costo, parametros_iniciales, opciones);
Donde parametros_iniciales son los valores iniciales de los parámetros del controlador PID y opciones es una estructura que permite personalizar el algoritmo de optimización, como el número máximo de iteraciones o la tolerancia de convergencia.
Cuáles son las ventajas y desventajas de utilizar la optimización automática en lugar de ajustar manualmente los parámetros del controlador PID
La optimización automática ofrece varias ventajas sobre el ajuste manual de los parámetros del controlador PID. En primer lugar, permite una búsqueda exhaustiva de las mejores combinaciones de parámetros en un tiempo mucho más corto. Esto ahorra tiempo y esfuerzo al ingeniero o programador. Además, la optimización automática es capaz de encontrar soluciones más precisas y eficientes, ya que tiene en cuenta todos los posibles valores de los parámetros. Sin embargo, también existen algunas desventajas. La optimización automática puede requerir una mayor capacidad de procesamiento y puede ser más compleja de implementar. Además, puede haber cierta pérdida de control sobre el proceso, ya que no se realiza un ajuste manual específico. A pesar de estas desventajas, la optimización automática sigue siendo una herramienta muy útil en el diseño de controladores PID.
Existen herramientas o funciones adicionales en MATLAB que faciliten la optimización del controlador PID
Sí, en MATLAB existen varias herramientas y funciones que pueden ayudarte a optimizar tu controlador PID de forma automática. Una de ellas es la función pidtune, que permite ajustar automáticamente los parámetros del controlador PID para obtener un rendimiento óptimo.
Otra herramienta útil es la función pidtool, que proporciona una interfaz gráfica para ajustar y optimizar el controlador PID. Esta herramienta te permite visualizar y ajustar los parámetros del controlador en tiempo real, lo que facilita la optimización del controlador para satisfacer tus requisitos específicos.
Además, MATLAB también ofrece la función step, que te permite realizar pruebas de respuesta escalón para evaluar el rendimiento del controlador PID y ajustar sus parámetros de manera iterativa. Esta función te ayuda a obtener una respuesta de control óptima y a mejorar la estabilidad y el rendimiento de tu sistema.
Es posible combinar la optimización automática con técnicas de control avanzadas en MATLAB
El controlador Proporcional-Integral-Derivativo (PID) es ampliamente utilizado en la industria para el control de sistemas dinámicos. Sin embargo, la sintonización manual de los parámetros del PID puede resultar un proceso tedioso y subjetivo. Afortunadamente, en MATLAB es posible combinar la optimización automática con técnicas de control avanzadas para optimizar los parámetros del controlador PID de forma automática.
La optimización automática es una técnica que utiliza algoritmos de búsqueda para encontrar los valores óptimos de los parámetros del controlador PID. En MATLAB, esto se puede lograr utilizando la función fminsearch o fmincon del Toolbox de Optimización.
La optimización automática es especialmente útil cuando se enfrentan sistemas complejos con múltiples variables y restricciones. Al utilizar esta técnica, se puede encontrar rápidamente el mejor conjunto de parámetros del controlador PID que minimice una función objetivo, como el error cuadrático medio o el tiempo de establecimiento.
¿Cómo se realiza la optimización automática del controlador PID en MATLAB?
En primer lugar, es necesario definir una función objetivo que cuantifique el rendimiento del controlador PID. Esta función puede estar basada en el error cuadrático medio entre la respuesta del sistema y la referencia deseada, o en cualquier otro criterio de desempeño específico del sistema.
A continuación, se utiliza la función de optimización de MATLAB para minimizar la función objetivo, variando los valores de los parámetros del controlador PID. Los valores iniciales de los parámetros pueden ser proporcionados por el usuario o generados aleatoriamente.
El algoritmo de optimización realizará iteraciones sucesivas para encontrar el conjunto de parámetros que minimice la función objetivo. Durante cada iteración, se evaluará el rendimiento del controlador con los parámetros actuales y se ajustarán los valores de los parámetros para mejorar el rendimiento.
Una vez que se alcanza el número máximo de iteraciones o se cumple un criterio de convergencia, el algoritmo de optimización devolverá los valores óptimos de los parámetros del controlador PID.
Beneficios de la optimización automática del controlador PID en MATLAB
La optimización automática del controlador PID en MATLAB ofrece varios beneficios clave. En primer lugar, permite ahorrar tiempo y esfuerzo al eliminar la sintonización manual de los parámetros del controlador.
Además, la optimización automática puede mejorar significativamente el rendimiento del controlador PID, ya que los parámetros se ajustan de acuerdo a un criterio objetivo y no subjetivo.
Asimismo, esta técnica es especialmente útil cuando se enfrentan sistemas complejos o se deben cumplir restricciones específicas, ya que permite encontrar rápidamente la mejor solución dentro del espacio de búsqueda de parámetros.
Cómo evaluar el rendimiento del controlador PID optimizado en MATLAB
Una vez que hayas optimizado tu controlador PID en MATLAB, es importante evaluar su rendimiento para asegurarte de que esté funcionando de manera efectiva. Existen diferentes métricas que puedes utilizar para evaluar el rendimiento de tu controlador PID, como el error cuadrático medio (MSE) o el error absoluto medio (MAE).
El MSE calcula el promedio de los errores al cuadrado entre la salida deseada y la salida real del sistema controlado. Un MSE bajo indica un buen rendimiento del controlador, ya que significa que los errores son pequeños y se acercan a cero. Por otro lado, el MAE calcula el promedio de los errores absolutos entre la salida deseada y la salida real, y también proporciona una medida del rendimiento del controlador.
Además de estas métricas, también es importante evaluar el comportamiento del controlador en diferentes situaciones. Puedes hacer esto mediante la simulación de diferentes escenarios o aplicando señales de entrada al sistema controlado y observar cómo responde el controlador. Esto te permitirá identificar posibles problemas y ajustar tu controlador PID de manera adecuada.
Evaluar el rendimiento de tu controlador PID optimizado en MATLAB es esencial para asegurarte de que esté funcionando correctamente. Utiliza métricas como el MSE o el MAE, y realiza simulaciones o pruebas en diferentes situaciones para verificar su comportamiento. Esto te ayudará a optimizar aún más tu controlador para obtener resultados óptimos en tu sistema de control.
Cuáles son los pasos recomendados para implementar el controlador PID optimizado en un sistema real
Una vez que hayas diseñado tu controlador PID en MATLAB, es importante optimizarlo para garantizar un rendimiento óptimo en tu sistema en tiempo real. A continuación, se presentan los pasos recomendados para implementar el controlador PID optimizado:
1. Identificación del sistema
Antes de optimizar el controlador, es necesario identificar el sistema que se va a controlar. Esto implica recopilar datos experimentales o realizar pruebas para determinar el comportamiento del sistema y obtener un modelo matemático adecuado.
2. Sintonización inicial del controlador PID
Una vez que se conoce el modelo del sistema, se puede realizar una sintonización inicial del controlador PID. Esto implica ajustar los valores de las constantes proporcional, integral y derivativa para lograr un control básico del sistema.
3. Recopilación de datos en tiempo real
Para optimizar el controlador PID, es necesario recopilar datos en tiempo real del sistema controlado. Esto implica realizar pruebas y registrar las respuestas del sistema a diferentes entradas y condiciones de operación.
4. Análisis de los datos recopilados
Una vez que se han recopilado los datos, es necesario analizarlos para identificar posibles problemas, como la presencia de retardos, oscilaciones o tiempos de respuesta lentos. Esto permitirá identificar áreas específicas para mejorar el rendimiento del controlador.
5. Optimización automática del controlador PID
Utilizando los datos recopilados y el análisis realizado, puedes utilizar algoritmos de optimización automáticos en MATLAB para ajustar las constantes del controlador PID. Estos algoritmos buscarán los valores óptimos que minimicen el error y mejoren el rendimiento del sistema.
6. Validación del controlador optimizado
Una vez que se ha realizado la optimización del controlador, es importante validar su rendimiento en el sistema real. Esto implica realizar pruebas adicionales y comparar los resultados con los esperados. Si se obtienen mejoras significativas, se considera que el controlador PID ha sido optimizado correctamente.
Optimizar un controlador PID en MATLAB de forma automática requiere seguir una serie de pasos que incluyen la identificación del sistema, la sintonización inicial del controlador, la recopilación y análisis de datos en tiempo real, y la optimización automática utilizando algoritmos adecuados. La validación del controlador optimizado en el sistema real es esencial para garantizar su correcto funcionamiento y rendimiento.
Preguntas frecuentes (FAQ)
¿Qué es un controlador PID?
Un controlador PID es un algoritmo utilizado en sistemas de control para ajustar la salida de un proceso en función de la diferencia entre la referencia deseada y la salida real. PID significa Proporcional, Integral y Derivativo, y cada uno de estos términos contribuye al cálculo de la señal de control.
¿Por qué es importante optimizar un controlador PID?
La optimización de un controlador PID es importante para mejorar la respuesta del sistema y lograr un mejor rendimiento, reduciendo los errores y minimizando los tiempos de respuesta. Una optimización adecuada del controlador PID puede ayudar a maximizar la estabilidad, precisión y eficiencia del sistema de control.
¿Cómo se optimiza un controlador PID en MATLAB de forma automática?
En MATLAB, se puede utilizar la función pidtuner para optimizar automáticamente un controlador PID. Esta función utiliza técnicas de ajuste de controladores para encontrar los mejores valores de los parámetros del controlador PID que minimicen el error y optimicen el rendimiento del sistema.
¿Qué parámetros se pueden ajustar en un controlador PID?
Los parámetros que se pueden ajustar en un controlador PID son el coeficiente proporcional (Kp), el coeficiente integral (Ki) y el coeficiente derivativo (Kd). Estos parámetros determinan cómo el controlador responde a la diferencia entre la referencia deseada y la salida real, y pueden ser ajustados para optimizar el rendimiento del sistema.
¿Qué criterios se utilizan para evaluar el rendimiento de un controlador PID?
Los criterios comunes utilizados para evaluar el rendimiento de un controlador PID son la estabilidad, la respuesta transitoria y la capacidad de rechazo a perturbaciones. La estabilidad se refiere a la capacidad del controlador de mantener la salida dentro de límites aceptables. La respuesta transitoria se refiere a la rapidez con la que el sistema alcanza la referencia deseada sin oscilaciones excesivas. La capacidad de rechazo a perturbaciones se refiere a la capacidad del controlador de mantener la salida estable incluso cuando se aplican perturbaciones al sistema.
Calcula la derivada por definición en MATLAB: paso a paso

Añade columna al inicio de un vector en MATLAB: guía fácil y rápida
Conviértete en un experto: Cómo crear un array de 0 a 1 en MATLAB
Encuentra fácilmente el valor mínimo en un array cell en MATLAB
Abre tus ficheros de forma rápida y sencilla con este script de Matlab
Elimina archivos de una carpeta con Matlab de forma sencilla
Elevar 10 a un número en MATLAB: La guía definitiva sin complicaciones
Aprende fácilmente a calcular las soluciones de una función con MATLAB
Calcula la media de un vector en Matlab fácilmente paso a paso
Deja una respuesta
Artículos que podrían interesarte